Serija varilnih robotov


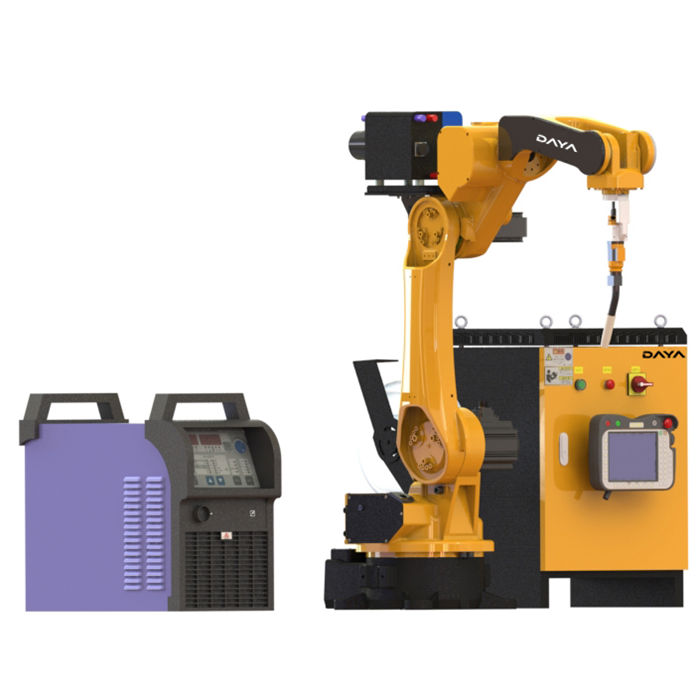

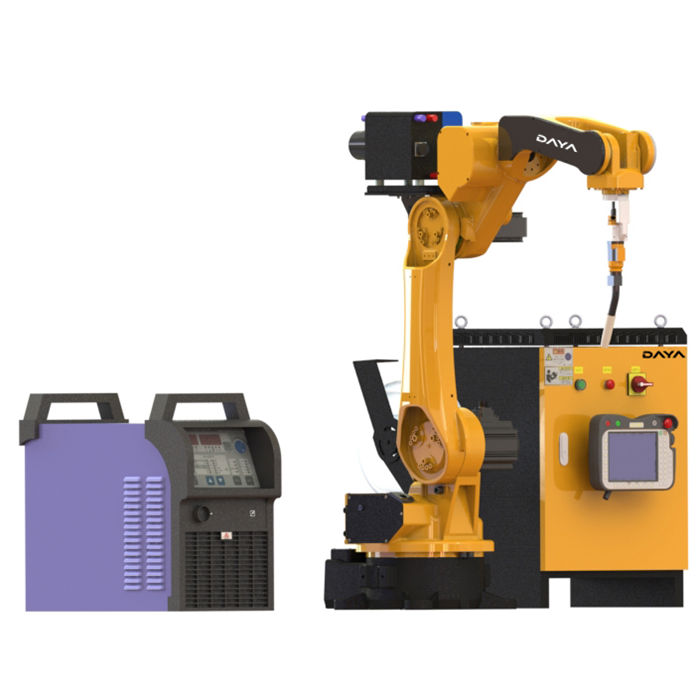
Varilni robot

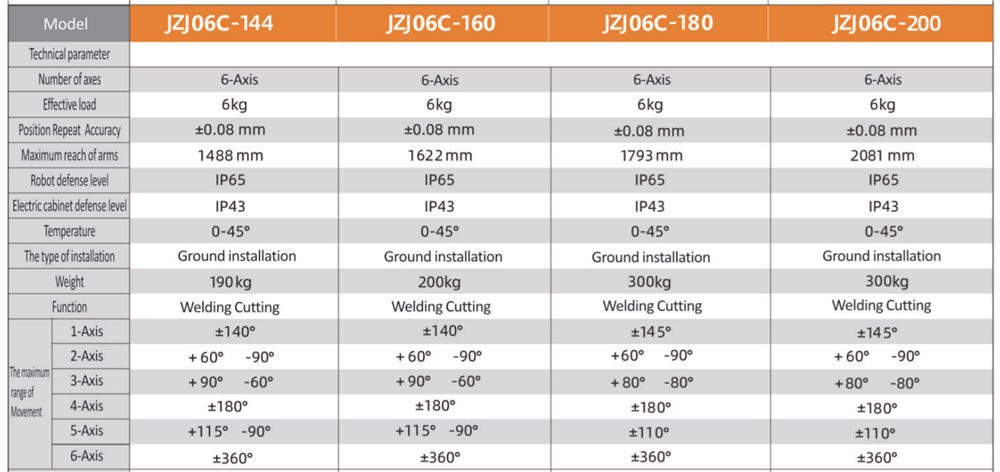
Varilni robot serije JZJ06C-180
Varilni robot serije JZJ06C-144

Varilni robot serije JZJ06C-160

Varilni robot serije JZJ06C-200
Kratek uvod
Varilni robot je industrijski robot, ki se ukvarja z varjenjem (vključno z rezanjem in brizganjem). Po definiciji mednarodne organizacije za standardizacijo (ISO), da industrijski robot spada v standardni varilni robot, je industrijski robot večnamenski, ponovljivi programirljivi manipulator s tremi ali več programabilnimi osmi, ki se uporablja na področju industrijske avtomatizacije. Da se prilagodi različnim aplikacijam, je običajno mehanski vmesnik zadnje osi robota povezovalna prirobnica, ki jo lahko povežemo z različnimi orodji ali končnimi efektorji. Varilni robot je namestiti varilne klešče ali varilno (rezalno) pištolo na prirobnico končne gredi industrijskega robota, tako da lahko izvaja varjenje, rezanje ali termično brizganje.
Robotsko varjenje je uporaba mehaniziranih programabilnih orodij (robotov), ki popolnoma avtomatizirajo postopek varjenja tako z varjenjem kot z obdelavo dela. Postopki, kot je plinsko obločno varjenje, čeprav so pogosto avtomatizirani, niso nujno enakovredni varjenju z roboti, saj človeški operater včasih pripravi materiale za varjenje. Robotsko varjenje se pogosto uporablja za odporno točkovno varjenje in obločno varjenje v visoko proizvodnih aplikacijah, kot je avtomobilska industrija.
Robotsko varjenje je razmeroma nova uporaba robotike, čeprav so bili roboti prvič predstavljeni v ameriški industriji v šestdesetih letih prejšnjega stoletja. Uporaba robotov pri varjenju se je začela šele v osemdesetih letih, ko je avtomobilska industrija začela robote pogosto uporabljati za točkovno varjenje. Od takrat je tako naraslo število robotov, ki se uporabljajo v industriji, in število njihovih aplikacij. Leta 2005 je bilo v severnoameriški industriji več kot 120.000 robotov, od tega približno polovica za varjenje. [1] Rast je omejena predvsem z visokimi stroški opreme in posledično omejitvijo za visoko proizvodne aplikacije.
Ročno obločno varjenje je začelo hitro naraščati pred kratkim in že obvladuje približno 20% aplikacij industrijskih robotov. Glavni sestavni deli robotov za obločno varjenje so manipulator ali mehanska enota in krmilnik, ki deluje kot "možgani" robota. Manipulator je tisto, zaradi česar se robot premika, in zasnovo teh sistemov lahko razvrstimo v več običajnih tipov, kot sta SCARA in kartezični koordinatni robot, ki z različnimi koordinatnimi sistemi usmerja roke stroja.
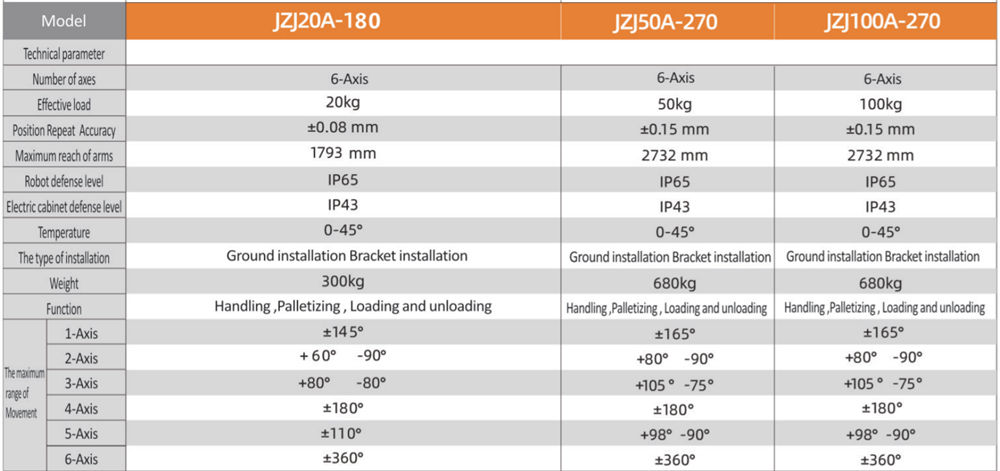
Tehnični parametri serije varilnih robotov